Unstructured Meshes¶
We discretize the spatial domain of interest before solving PDEs. The discretized space is called a mesh [Mavriplis97]. When discretization is done by exploiting regularity in space, like cutting along each of the Cartesian coordinate axes, the discretized space is called a structured mesh. If the discretization does not follow any spatial order, we call the spatial domain an unstructured mesh. Both meshing strategies have their strength and weakness. Sometimes a structured mesh is also call a grid. Numerical methods that rely on spatial discretization are called mesh-based or grid-based.
To accommodate complex geometry, SOLVCON chose to use unstructured meshes of mixed elements. Because no structure is assumed for the geometry to be modeled, the mesh can be automatically generated by using computer programs. For example, the following image shows a triangular mesh of a two-dimensional irregular domain:
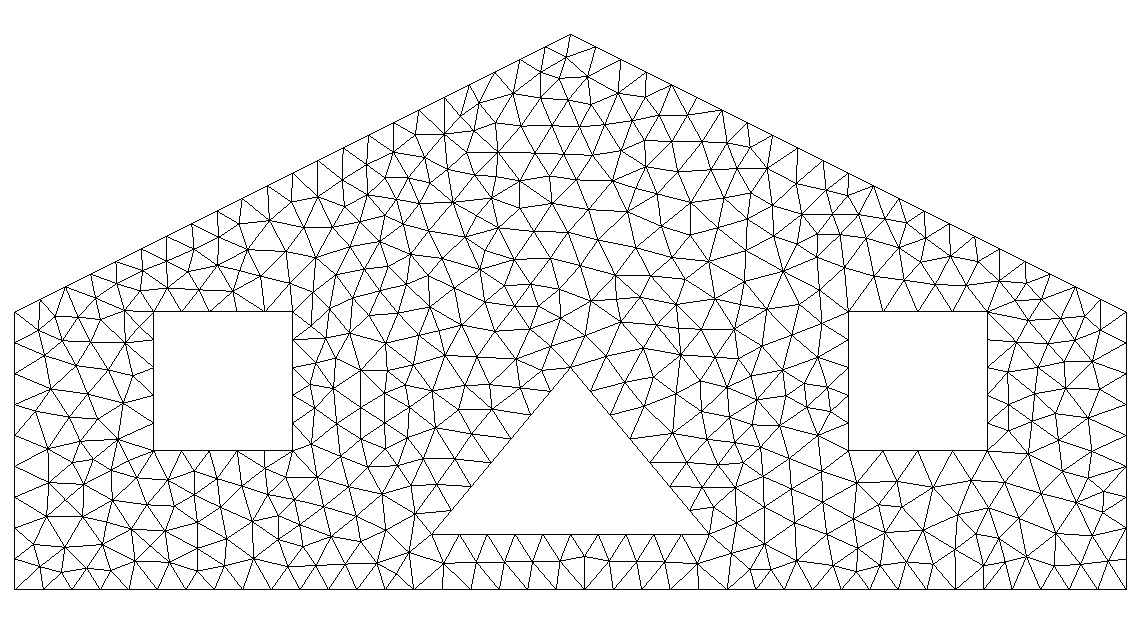
Figure 1: Two-dimensional sample mesh
which is generated by using the Gmsh (see the
command file ustmesh_2d_sample.geo [1]). On the other hand, creation
of structured meshes often needs a large amount of manual operations and will
not be discussed in this document.
In SOLVCON, we assume a mesh is fully covered by a finite number of non-overlapping sub-regions, and only composed by these sub-regions. The sub-regions are called mesh elements. In one-dimensional space, SOLVCON also defines one type of mesh elements, line, as shown in Figure One-dimensional mesh element.
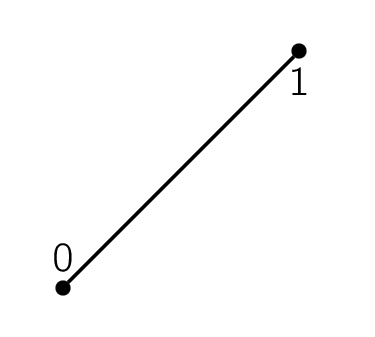
Figure 2: One-dimensional mesh element
SOLVCON allows two types of two-dimensional mesh elements, quadrilaterals and triangles, as shown in Figure Two-dimensional mesh elements, and four types of three-dimensional mesh elements, hexahedra, tetrahedra, prisms, and pyramids, as shown in Figure Three-dimensional mesh elements.
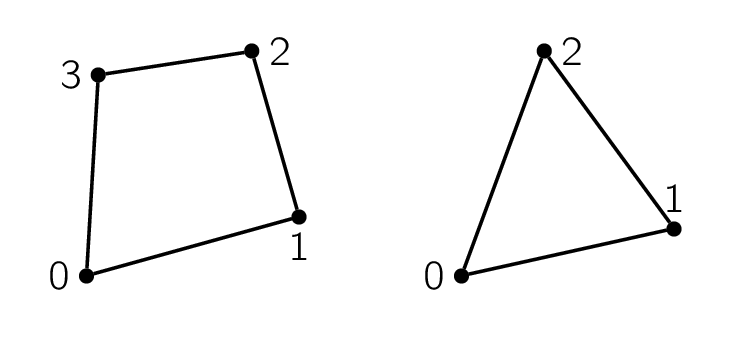
Figure 3: Two-dimensional mesh elements
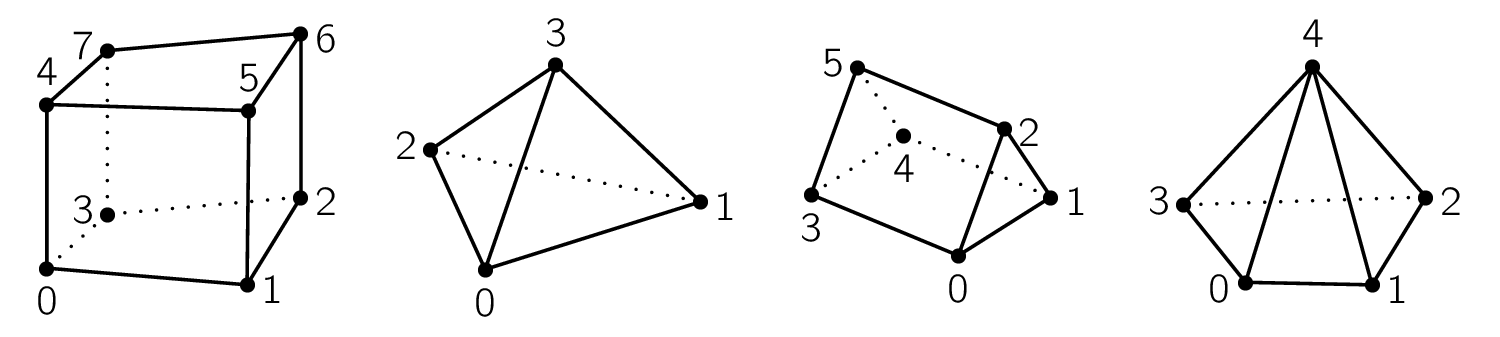
Figure 4: Three-dimensional mesh elements
The numbers annotated in the figures are the order of the vertices of the elements. A SOLVCON mesh can be a mixture of elements of the same dimension, although it often only one element type.
Entities¶
Before explaining the data structure of the meshes, we need to introduce some basic terminologies and definitions. In SOLVCON, a cell means a mesh element. The dimensionality of a cell equals to that of the mesh it belongs to, e.g., a two-dimensional mesh is composed by two-dimensional cells. A cell is assumed to be concave, and enclosed by a set of faces. The dimensionality of a face is one less than that of a cell. A face is also assumed to be concave, and formed by connecting a sequence of nodes. The dimensionality of a node is at least one less than that of a face. Cells, faces, and nodes are the basic constructs, which we call entities, of a SOLVCON mesh.
Defining the term “entity” for SOLVCON facilitates a unified treatment of two- and three-dimensional meshes and the corresponding solvers [2]. A cell can be either two- or three-dimensional, and the associated faces become one- or two-dimensional, respectively. Because a face is either one- or two-dimensional, it can always be formed by a sequence of points, which is zero-dimensional. In this treatment, a point is equivalent to a node defined in the previous passage.
Take the two-dimensional mesh shown above as an example, triangular elements are used as the cells. The triangles are formed by three lines (one-dimensional shapes), which are the faces. Each line has two points (zero-dimensional). If we have a three-dimensional mesh composed by hexahedral cells, then the faces should be quadrilaterals (two-dimensional shapes).
All the mesh elements supported by SOLVCON are listed in the following table. The first column is the name of the element, and the second column is the type ID used in SOLVCON. The third column lists the dimensionality. The fourth, fifth, and sixth columns show the number of zero-, one-, and two-dimensional sub-entities belong to the element type, respectively. Note that the terms “point” and “line” appear in both the first row and first column, for they are the only element type in the space of the corresponding dimensionality.
| Name | Type | Dim | Point# | Line# | Surface# |
|---|---|---|---|---|---|
| Point | 0 | 0 | 0 | 0 | 0 |
| Line | 1 | 1 | 2 | 0 | 0 |
| Quadrilateral | 2 | 2 | 4 | 4 | 0 |
| Triangle | 3 | 2 | 3 | 3 | 0 |
| Hexahedron | 4 | 3 | 8 | 12 | 6 |
| Tetrahedron | 5 | 3 | 4 | 4 | 4 |
| Prism | 6 | 3 | 6 | 9 | 5 |
| Pyramid | 7 | 3 | 5 | 8 | 5 |
Although SOLVCON doesn’t support one-dimensional solvers, for completeness, we define the relation between one-dimensional cells (lines) and their sub-entities as:
| Shape (type) | Face | = Point |
|---|---|---|
| Line (0) | 0 | \(\cdot\) 0 |
| 1 | \(\cdot\) 1 |
That is, as shown in Figure One-dimensional mesh element, a one-dimensional “cell” (line) has two “faces”, which are essentially point 0 and point 1. Symbol \(\cdot\) indicates a point.
It will be more practical to illustrate the relation between two-dimensional cells and their sub-entities in a table (see Figure Two-dimensional mesh elements for point locations):
| Shape (type) | Face | = Line formed by points |
|---|---|---|
| Quadrilateral (2) | 0 | \(\diagup\) 0 1 |
| 1 | \(\diagup\) 1 2 | |
| 2 | \(\diagup\) 2 3 | |
| 3 | \(\diagup\) 3 0 | |
| Triangle (3) | 0 | \(\diagup\) 0 1 |
| 1 | \(\diagup\) 1 2 | |
| 2 | \(\diagup\) 2 0 |
Symbol \(\diagup\) indicates a line. The orientation of lines of each two-dimensional shape is defined to follow the right-hand rule. The shape enclosed by the lines has an area normal vector points to the direction of \(+z\) (outward paper/screen).
The relation between three-dimensional cells and their sub-entities is defined in the table (see Figure Three-dimensional mesh elements for point locations):
| Shape (type) | Face | = Surface formed by points |
|---|---|---|
| Hexahedron (4) | 0 | \(\square\) 0 3 2 1 |
| 1 | \(\square\) 1 2 6 5 | |
| 2 | \(\square\) 4 5 6 7 | |
| 3 | \(\square\) 0 4 7 3 | |
| 4 | \(\square\) 0 1 5 4 | |
| 5 | \(\square\) 2 3 7 6 | |
| Tetrahedron (5) | 0 | \(\triangle\) 0 2 1 |
| 1 | \(\triangle\) 0 1 3 | |
| 2 | \(\triangle\) 0 3 2 | |
| 3 | \(\triangle\) 1 2 3 | |
| Prism (6) | 0 | \(\triangle\) 0 1 2 |
| 1 | \(\triangle\) 3 5 4 | |
| 2 | \(\square\) 0 3 4 1 | |
| 3 | \(\square\) 0 2 5 3 | |
| 4 | \(\square\) 1 4 5 2 | |
| Pyramid (7) | 0 | \(\triangle\) 0 4 3 |
| 1 | \(\triangle\) 1 4 0 | |
| 2 | \(\triangle\) 2 4 1 | |
| 3 | \(\triangle\) 3 4 2 | |
| 4 | \(\square\) 0 3 2 1 |
Symbol \(\square\) indicates a quadrilateral, while symbol \(\triangle\) indicates a triangle.
Because a face is associated to two adjacent cells unless it’s a boundary face, it needs to identify to which cell it belongs, and to which cell it is neighbor. The area normal vector of a face is always point from the belonging cell to neighboring cell. The same rule applies to faces of two-dimensional meshes (lines) too.
Mesh Loading¶
A mesh is usually built up by using a mesh generator, like Gmsh. We then feed
the generated mesh file to SOLVCON, which converts the unstructured-mesh data
to the internal representation format: the Block class.
There are three steps required to fully construct a Block object:
(i) instantiation, (ii) definition, and (iii) build-up. First, when
instantiating an object, shape information must be provided to the constructor
to allocate arrays for look-up tables:
from solvcon import Block
blk = Block(ndim=2, nnode=4, ncell=3)
Second, we fill the cell definition. Node coordinates and the node lists of cells need to be provided:
# Node coordinates.
blk.ndcrd[:,:] = (0,0), (-1,-1), (1,-1), (0,1)
# Cell types.
blk.cltpn[:] = 3
# Node list of cells.
blk.clnds[:,:4] = (3, 0,1,2), (3, 0,2,3), (3, 0,3,1)
Third, build up the rest of the object by calling (they will be explained later):
blk.build_interior()
blk.build_boundary()
blk.build_ghost()
-
Block.build_interior()¶ Building up a
Blockobject includes two steps. First, the method deduce information from the defined arrayscltpnandclndsto create the arraysclfcs,fctpn,fcnds, andfccls. If the number of extracted faces is not the same as that passed into the constructor, arrays related to faces are recreated.The method then fills all the geometry arrays from
Block.ndcrd.
-
Block.build_boundary()¶ This method iterates over each of the
BCobjects listed inBlock.bclistto collect boundary-condition information and build boundary faces. If a face belongs to only one cell (i.e., has no neighboring cell), it is regarded as a boundary face.Unspecified boundary faces will be collected to form an additional
BCobject. It setsbndfcsfor later use bybuild_ghost().
-
Block.build_ghost()¶ This method creates the shared arrays, calculates the information for ghost cells, and reassigns interior arrays as the right portions of the shared arrays. Only after this ghost build-up process, the
Blockobject can be used by solvers.
-
Block.bndfcs¶ Type: numpy.ndarrayThe array is of shape (
nbound, 2) and typeint32. Each row contains the data for a boundary face. The first column is the 0-based index of the face, while the second column is the serial number of the associatedsolvcon.boundcond.BCobject.
We then can save the block to a VTK file for viewing:
from solvcon.io.vtkxml import VtkXmlUstGridWriter
iodev = VtkXmlUstGridWriter(blk)
iodev.write('block_2d_sample.vtu')
Figure 5: A simple Block object
-
class
solvcon.Block(ndim=0, nnode=0, nface=0, ncell=0, nbound=0, use_incenter=False)¶ This class represents the unstructured meshes used in SOLVCON. As such, in SOLVCON, an unstructured mesh is also called a “block”. The following six attributes can be passed into the constructor.
ndim,nnode, andncellneed to be non-zero to instantiate a valid block.nfaceandnboundmight be different to the given value after building up the object.use_incenteris an optional flag.-
nbound¶ Type: intTotal number of boundary faces or ghost cells of this mesh. Read only after instantiation.
-
use_incenter¶ Type: boolIndicates calculating incenters instead of centroids for cells. Default is
False(using centroids of cells).
The meshes are defined by three sets of look-up tables (arrays): (i) geometry, (ii) type, and (iii) connectivity.
Geometry Tables
-
ndcrd¶ Coordinates of nodes. It’s a two-dimensional
numpy.ndarrayarray of shape (nnode,ndim) of typefloat64.
-
fccnd¶ Centroids of faces. It’s a two-dimension
numpy.ndarrayof shape (nface,ndim) of typefloat64.
-
fcnml¶ Unit normal vectors of faces. It’s a two-dimension
numpy.ndarrayof shape (nface,ndim) of typefloat64.
-
fcara¶ Areas of faces. The value should always be non-negative. It’s a one-dimension
numpy.ndarrayof shape (nface,) of typefloat64.
-
clcnd¶ Centroids of cells. It’s a two-dimension
numpy.ndarrayof shape (ncell,ndim) of typefloat64.
-
clvol¶ Volumes of cells. It’s a one-dimension
numpy.ndarrayof shape (ncell,) of typefloat64.
Type Tables
-
fctpn¶ Type ID of faces. It’s a one-dimensional
numpy.ndarrayof shape (nface,) of typeint32.
-
cltpn¶ Type ID of cells. It’s a one-dimensional
numpy.ndarrayof shape (ncell,) of typeint32.
-
clgrp¶ Group ID of cells. It’s a one-dimensional
numpy.ndarrayof shape (ncell,) of typeint32. For a newBlockobject, it should be initialized with-1.
Connectivity Tables
-
fcnds¶ Lists of the nodes of each face. It’s a two-dimensional
numpy.ndarrayof shape (nface,FCMND+1) and typeint32.
-
fccls¶ Lists of the cells connected by each face. It’s a two-dimensional
numpy.ndarrayof shape (nface, 4) and typeint32.
-
clnds¶ Lists of the nodes of each cell. It’s a two-dimensional
numpy.ndarrayof shape (ncell,CLMND+1) and typeint32.
-
clfcs¶ Lists of the faces of each cell. It’s a two-dimensional
numpy.ndarrayof shape (ncell,CLMFC+1) and typeint32.
Constants
-
FCMND¶ Type: intThe maximum number of nodes that a face can have, which is 4.
-
CLMND¶ Type: intThe maximum number of nodes that a cell can have, which is 8.
-
CLMFC¶ Type: intThe maximum number of faces that a cell can have, which is 6.
-
Every look-up array has two associated arrays of different prefixes: (i)
gst (denoting for “ghost”) and (ii) sh (denoting for “shared”).
SOLVCON uses the technique of ghost cells to treat boundary conditions
[Mavriplis97], and the gst arrays store the information for ghost cells.
However, to facilitate efficient indexing in solvers, each of the ghost arrays
should be put in a continuous block of memory adjacent to its interior
counterpart. In SOLVCON, the sh arrays are the continuous memory blocks
for both ghost and interior look-up tables, and a pair of gst and normal
arrays is simply the views of two consecutive, non-overlapping sub-regions of a
memory block.
Footnotes
| [1] | The following command generates the mesh from the command file
$ gmsh ustmesh_2d_sample.geo -3
The following command converts the mesh to a VTK file for ParaView: $ scg mesh ustmesh_2d_sample.msh ustmesh_2d_sample.vtk
|
| [2] | SOLVCON focuses on two- and three-dimensional meshes. But if we put an additional constraint on the mesh elements: Requiring them to be simplices, it wouldn’t be difficult to extend the data structure of SOLVCON meshes into higher-dimensional space. |
